Geri Dönüşüm Robot Kolu
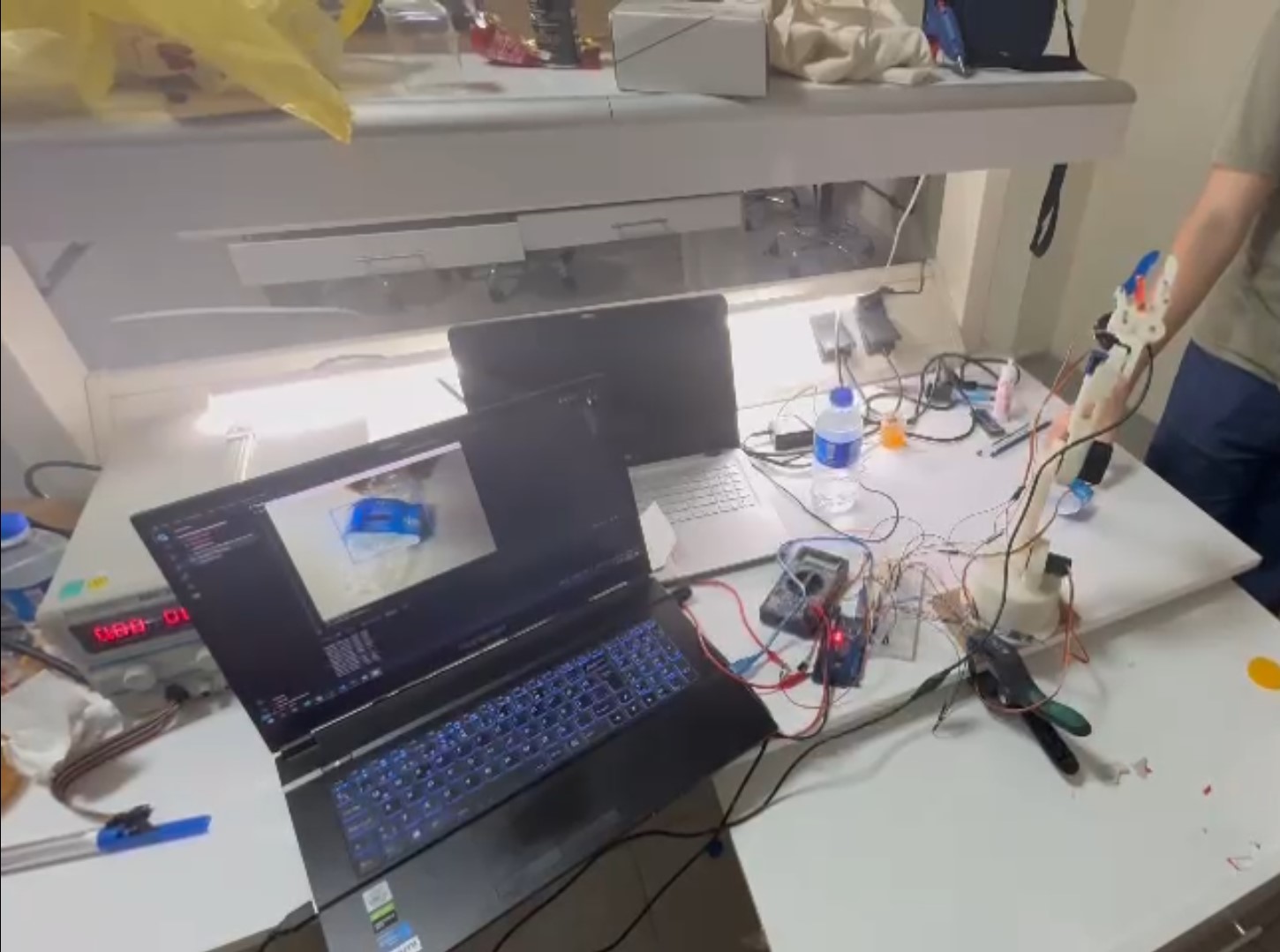
Python ve OpenCV kullanarak pet şişelerdeki açık mavi tonu tespit eden, konumunu hesaplayıp Arduino kontrollü robot kola hedef koordinatları gönderen ve şişeyi kıskaç ile kavrayarak tutan robot kol.
Proje Hakkında
Bu projede amaç, geri dönüşüm sürecini otomatikleştirmek için renk tabanlı nesne tespiti ve robot kol kontrolünü birleştiren akıllı bir sistem tasarlamaktır. Kamera ile alınan görüntü akışı, Python ve OpenCV kullanılarak işlenir; görüntü önce uygun renk uzayına (örneğin BGR → HSV) dönüştürülür, ardından açık mavi tonlarını temsil eden belirli bir renk aralığı için maskeleme yapılır. Maske üzerinde gürültü filtreleme (blur, erosion, dilation) ve kontur analizi uygulanarak şişenin konumu (x, y) tespit edilir.Sistem; otomatik nesne tespiti, gerçek zamanlı görüntü işleme ve fiziksel robot hareketini birleştirerek, özellikle renge dayalı ayrıştırma gereken geri dönüşüm senaryolarına düşük maliyetli ve geliştirilebilir bir çözüm sunar.
Diğer Projelere Göz At

qrisyerim.com.tr - QR Menü Oluşturucu
Django kullanarak geliştirdiğim website. URL yapılandırmasını her restoran için farklı olacak şekilde oluşturup, her restorana özel …
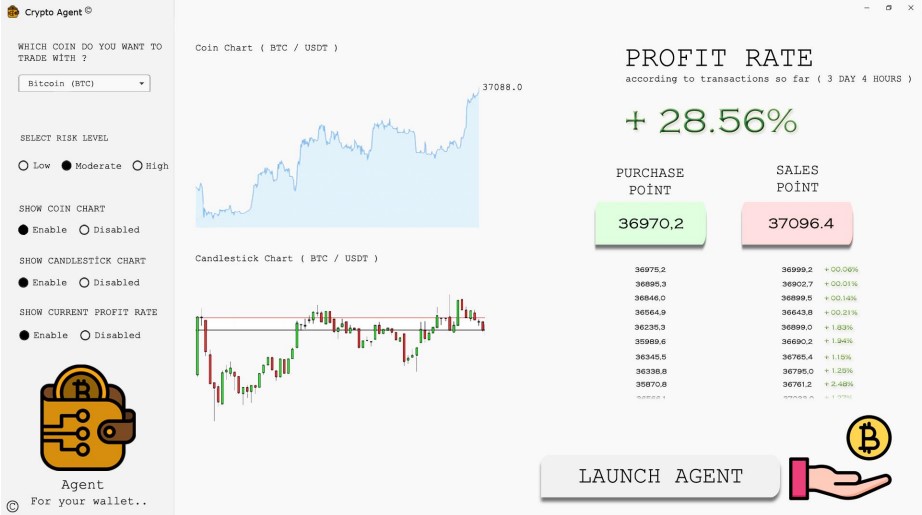
Otonom Kripto Ajan
Bu proje, PyQt ve Qt Designer kullanılarak geliştirilen, kripto para piyasasında al-sat süreçlerini desteklemeye odaklı bir …